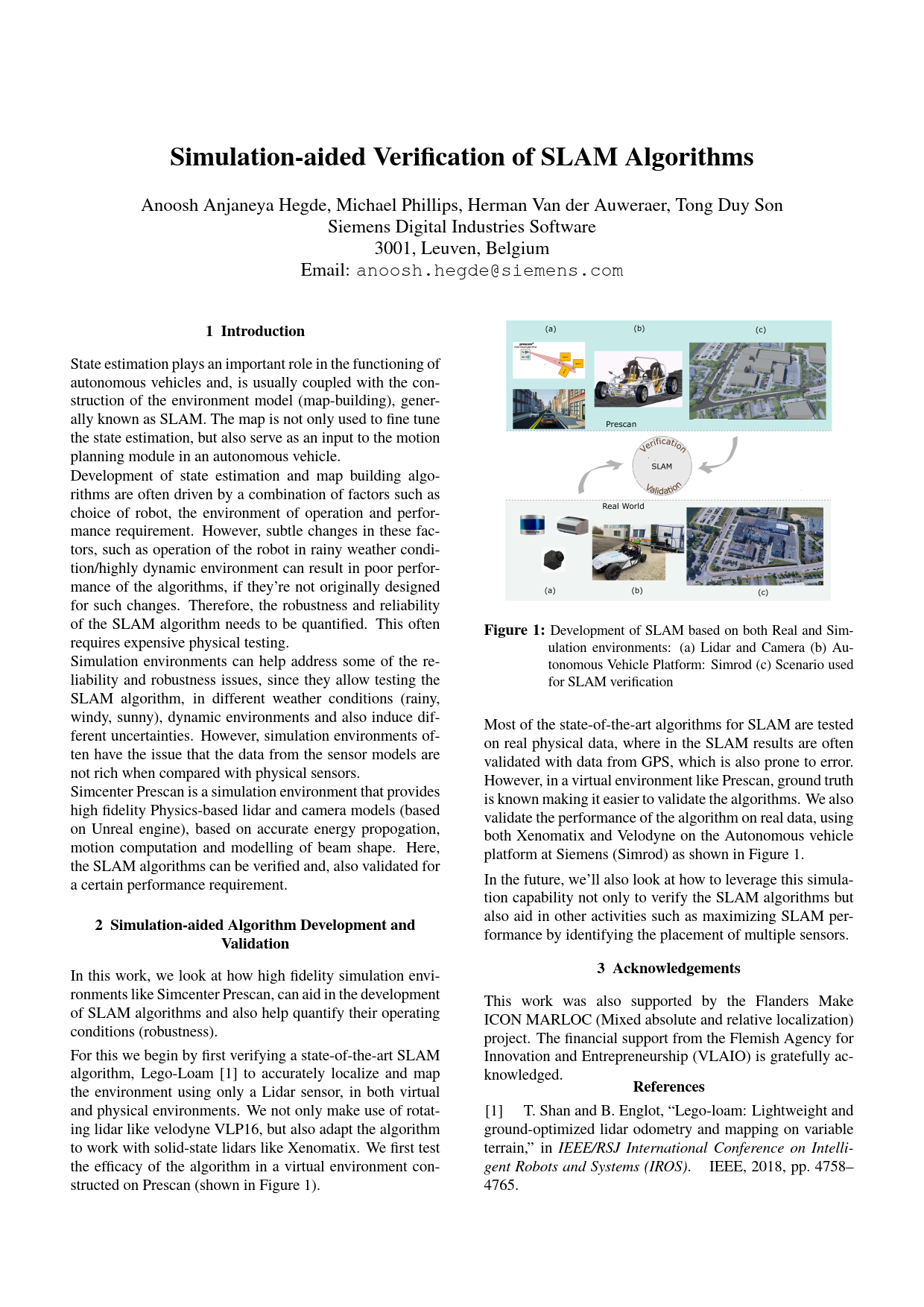
- Simulation-aided verification of SLAM (with Anoosh Anjaneya Hegde, Mike Phillips)
- Vehicle dynamics identification for ADAS testing and control (with Ludovico Ruga, Theo Geluk)
- Sim2real for autonomous vehicle control using executable digital twin (xDT) (with Jean Pierre Allamaa, Panagiotis (Panos) Patrinos, Herman Van der Auweraer)
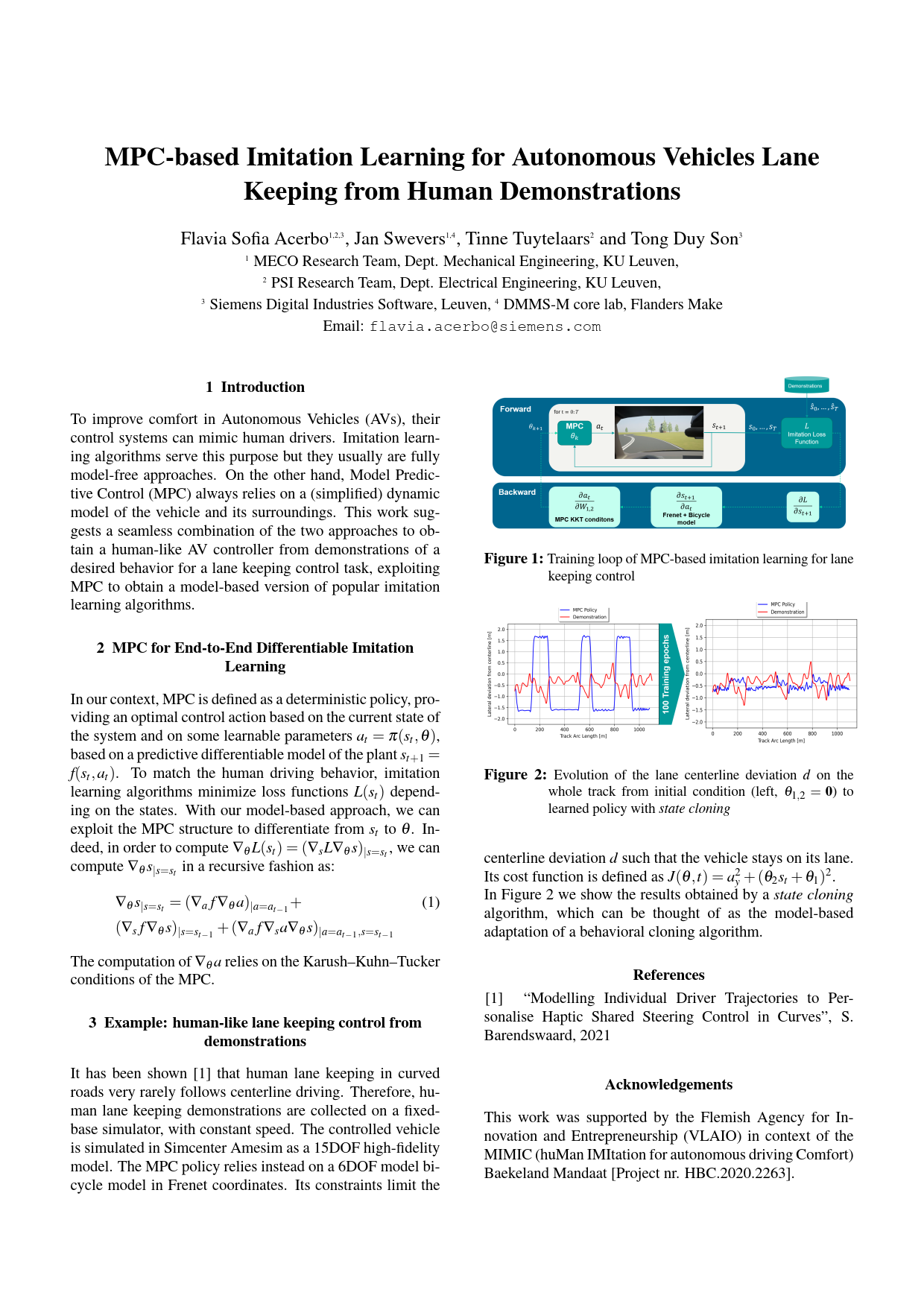
- MPC-based imitation learning from human demonstrations (with Flavia Sofia Acerbo, Jan Swevers, Tinne Tuytelaars)
You can find more details in the 1-page abstracts. They will also be presenting in the Benelux Meeting on Systems and Control this summer.