In autonomous vehicle development, simulation-based testing has been used widely to validate safety functions. But how simulation can also help to test human perception, for example, if the braking function at an intersection is comfortable or scary, especially when driver/passengers are in passive mode? This topic is largely unexplored in the ADAS industry, or with many limitations.
We are trying to tackle this challenge to improve human perceived safety and comfort evaluation. One approach is to bridge the gap of two domains: ADAS engineering and visualization.
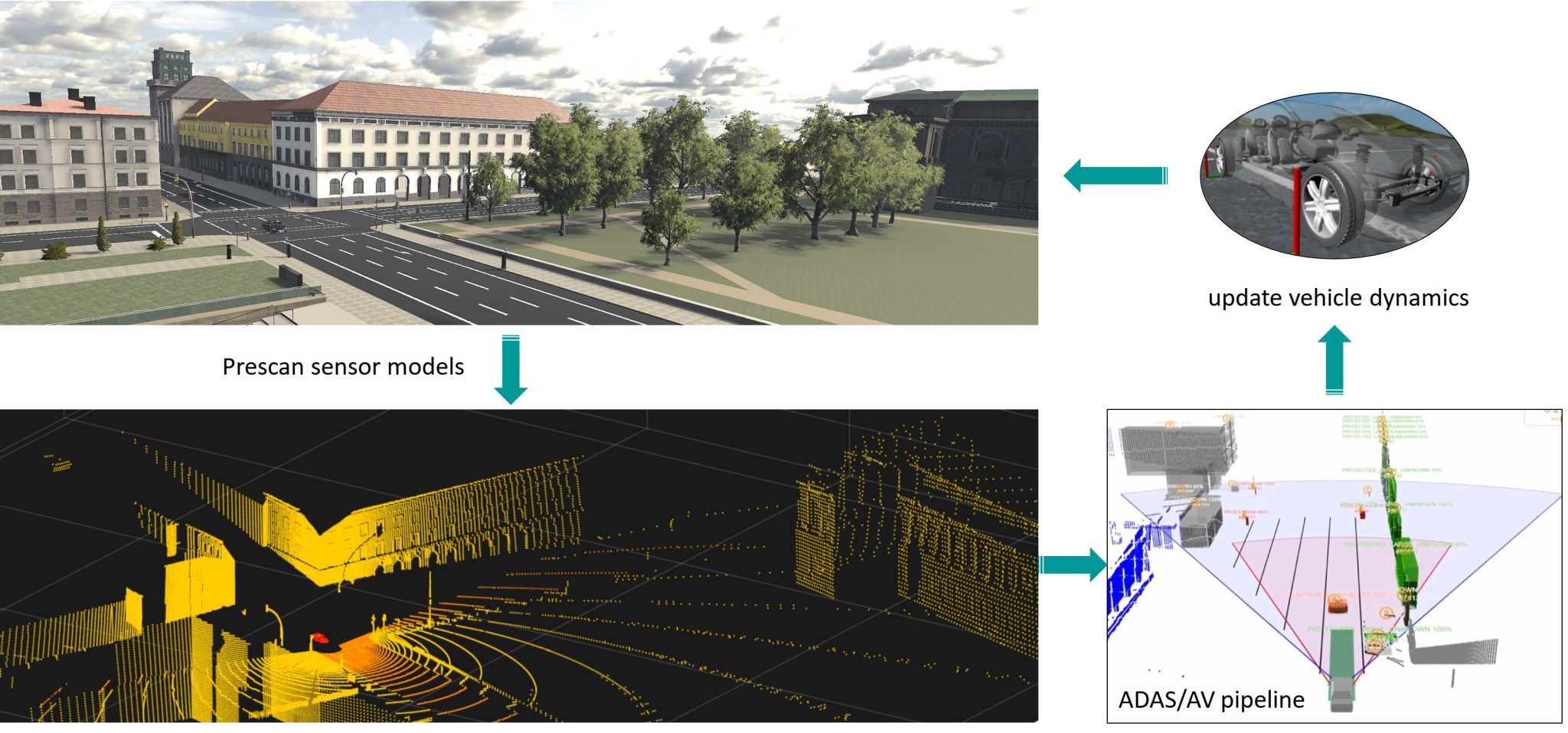
It is realized via development of an integrated modular virtual reality (VR) visualization platform to the existing ADAS simulation pipeline. Significant efforts have been also devoted to building and tuning a large and high quality 3D Munich city model (on realism, structure, texture, material). The model is then optimized into a real-time VR platform in Unity, and also Simcenter Prescan to exploit physics-based sensors (lidar, camera, radar) and perception-control algorithms. Overall, the testing platform helps to improve immersion, predictability of traffic perception together with realistic feeling of actual ADAS functions and vehicle dynamics motion.
If you are interested, find more in our paper here (or just enjoy some visualization beauty :) : https://lnkd.in/e6fRnP7q
The project is a collaboration between Siemens Digital Industries Software (Herman Van der Auweraer, Son Tong) and Hochschule München University of Applied Sciences (Prof. Markus Oster and his lab, and the talent student Felix Bognar).
We also acknowledge the EU FOCETA project (Foundations for Continuous Engineering of Trustworthy Autonomy) for supporting this work.