category
Vision

22 Sep 2025
The nice image comes straight from the actual research & development results. From right to left, you can see the Gaussian Splatting training process progressively improve the 3D reconstruction.
![[Demo] Real2Sim Gaussian Splatting with Materials & Textures](/blog/2025/04/real2sim-gaussian-splatting-materials-textures/cover.png)
2 Apr 2025
When reconstructing 3D traffic model from real world data (Real2Sim), one of the challenges is incorporating physical properties such as materials and textures.

25 Jan 2025
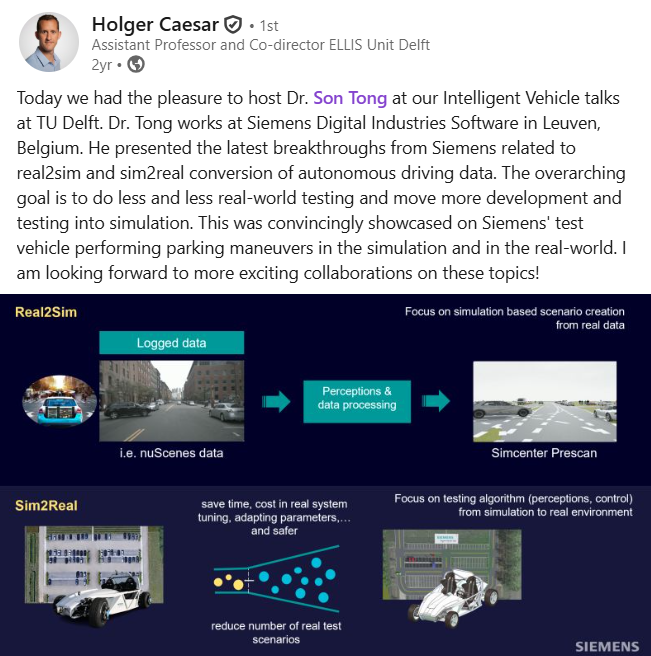
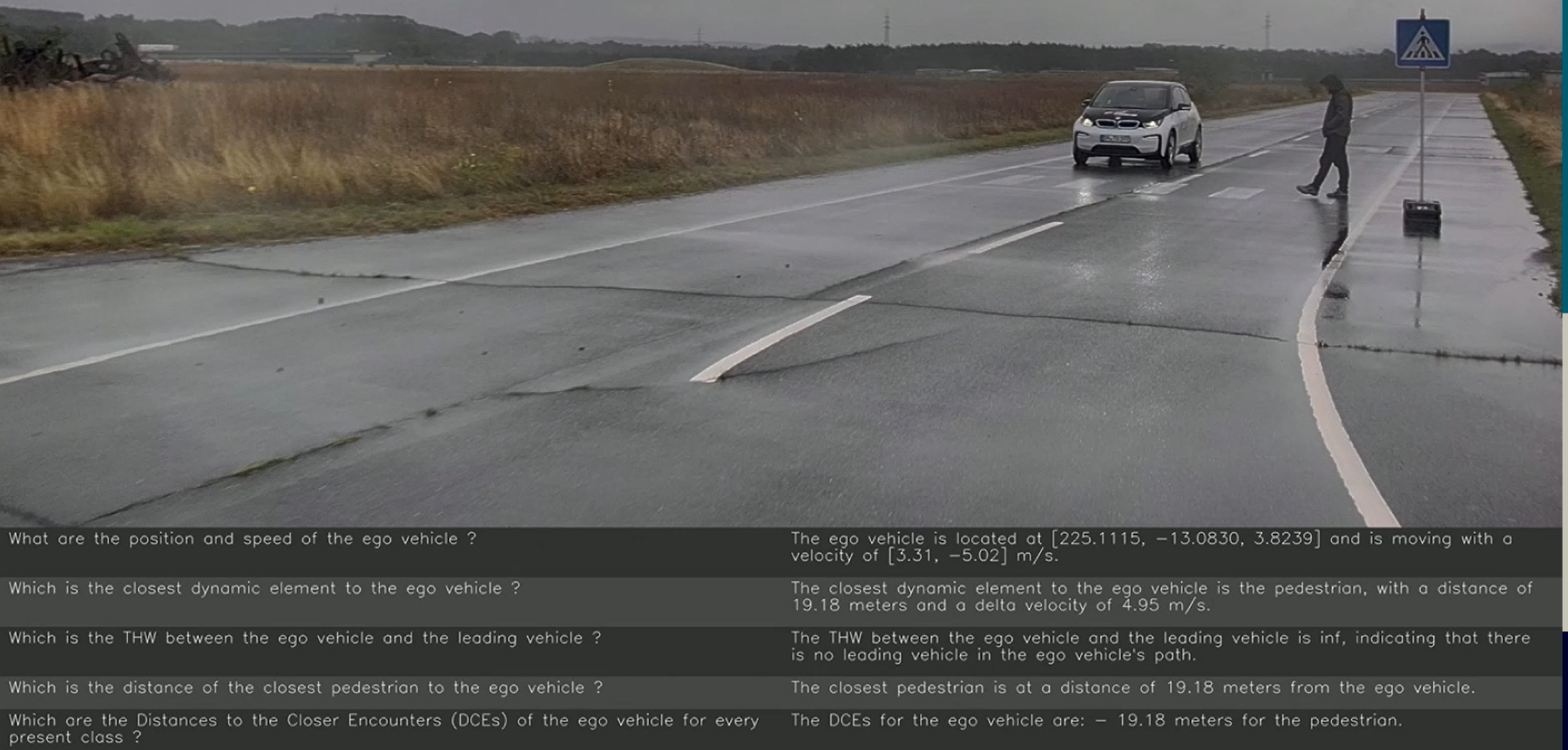
Great discussions with Prof. Holger Caesar (Intelligent Vehicles Group, TU Delft) with his visiting to our R&D team in Siemens Leuven office last Friday.
4 Jun 2024
I believe not only me but many autonomous driving engineers/researchers once has a dream that one day the vehicle sensor can sense the environment like we human do.