One common property in today ADAS/AV function design: autonomous driving control engineers often tune the control parameters, trying to make it safe (often cautious) and tradeoff with other factors such as comfort, fuel economy… After fined tune and deployed, the cars will usually drive from A to B in a similar and fixed style.
But people actually wants more from autonomous car, be cautious but also aggressive when necessary, be able and flexible moving along the tradeoff curves until physical limitation. In other words, it should drive safe, confident, smooth/comfortable, predictable, and even sometimes behaves like a professional driver.
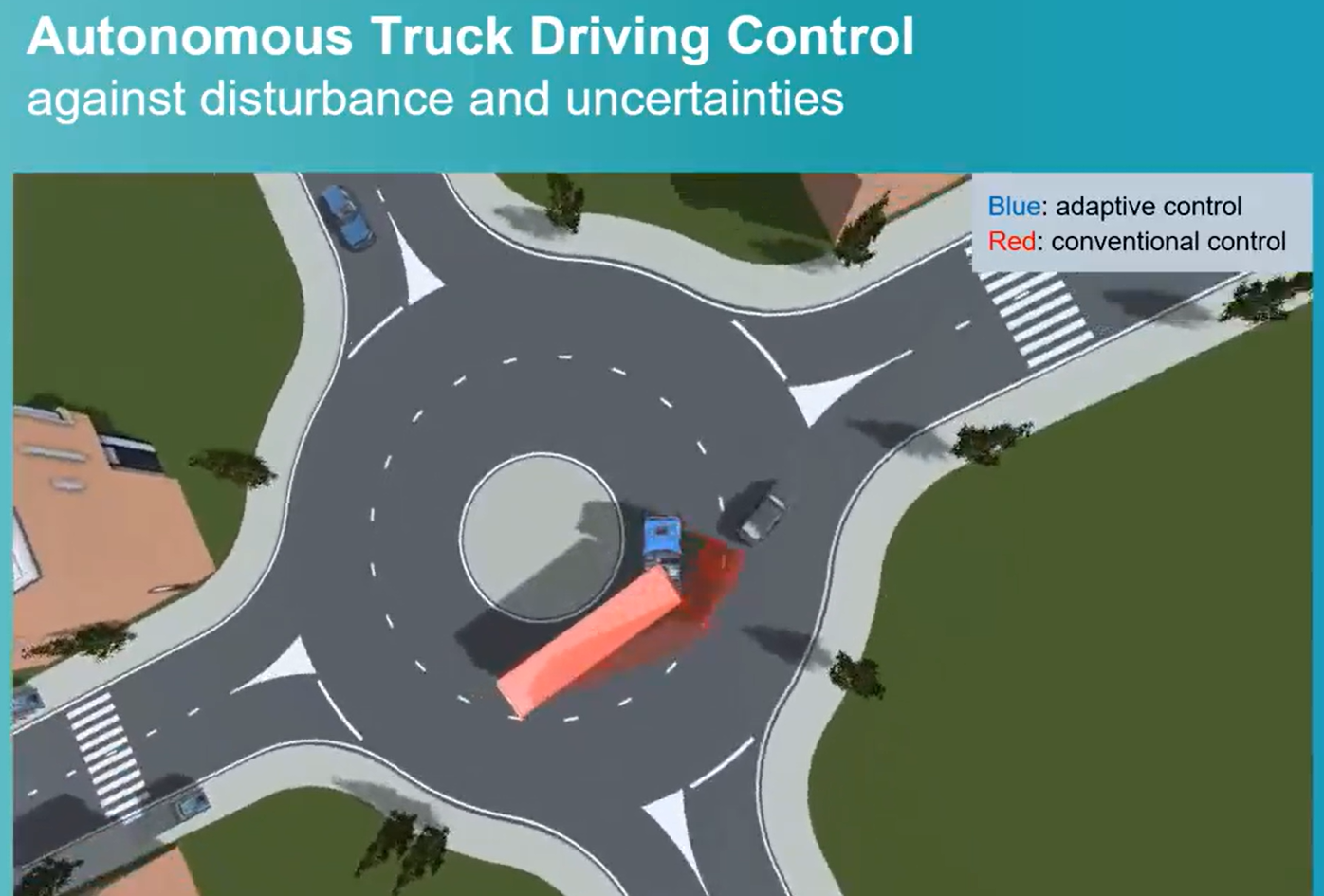
Check this video some of our considerations to push vehicle control to safety limit (the demos are made by our thesis students from EPFL, Linkoping, HAN Uni…)