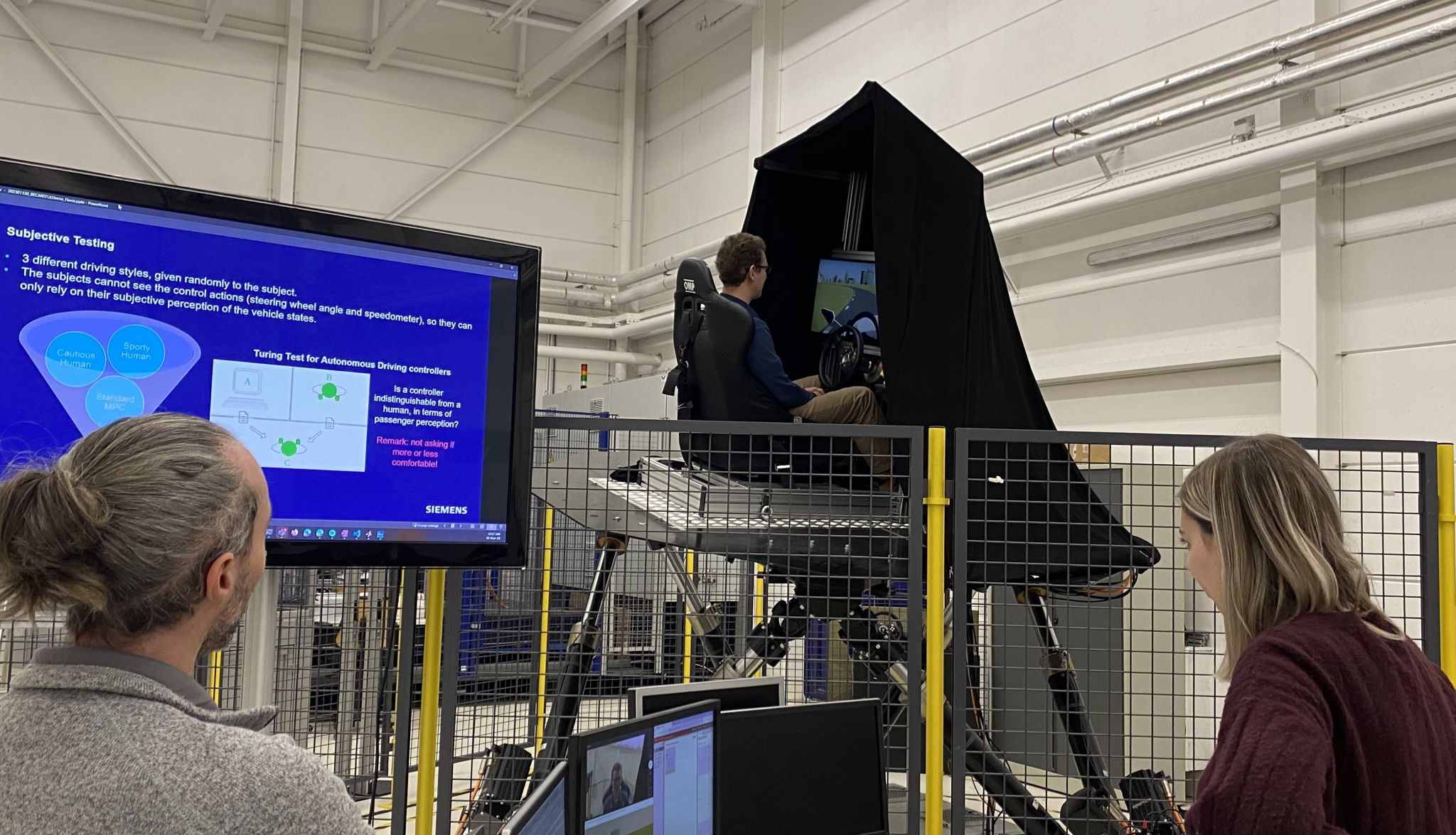
Comfort
![[Paper] Is this the real driver, or is it just a robot?](/blog/2026/05/is-this-the-real-driver-or-just-a-robot/cover.jpg)
A study of human-like autonomous driving controllers in a driving simulator just got published in Transportation Research Part F: Traffic Psychology and Behavior. The article is written by Flavia Sofia Acerbo, the industrial PhD at Siemens and KU Leuven
![[Papers] Human-centric AI in IEEE IROS and InCabin conferences](/blog/2024/10/human-centric-ai-iros-incabin-2024/cover.jpg)
A great pleasure to have our two research engineers going to present the company Siemens Digital Industries Software R&D activities on human-centric AI in IEEE IROS and InCabin conferences this month.
![[Paper] Data-driven Control for Human Driving Preferences](/blog/2024/04/data-driven-control-human-driving-preferences/cover.png)
Getting more insights of human driving preferences (i.e. when and how to brake, steering at different traffic scenarios), perceived safety, different cultures and styles,... are essential to improve ADAS control development
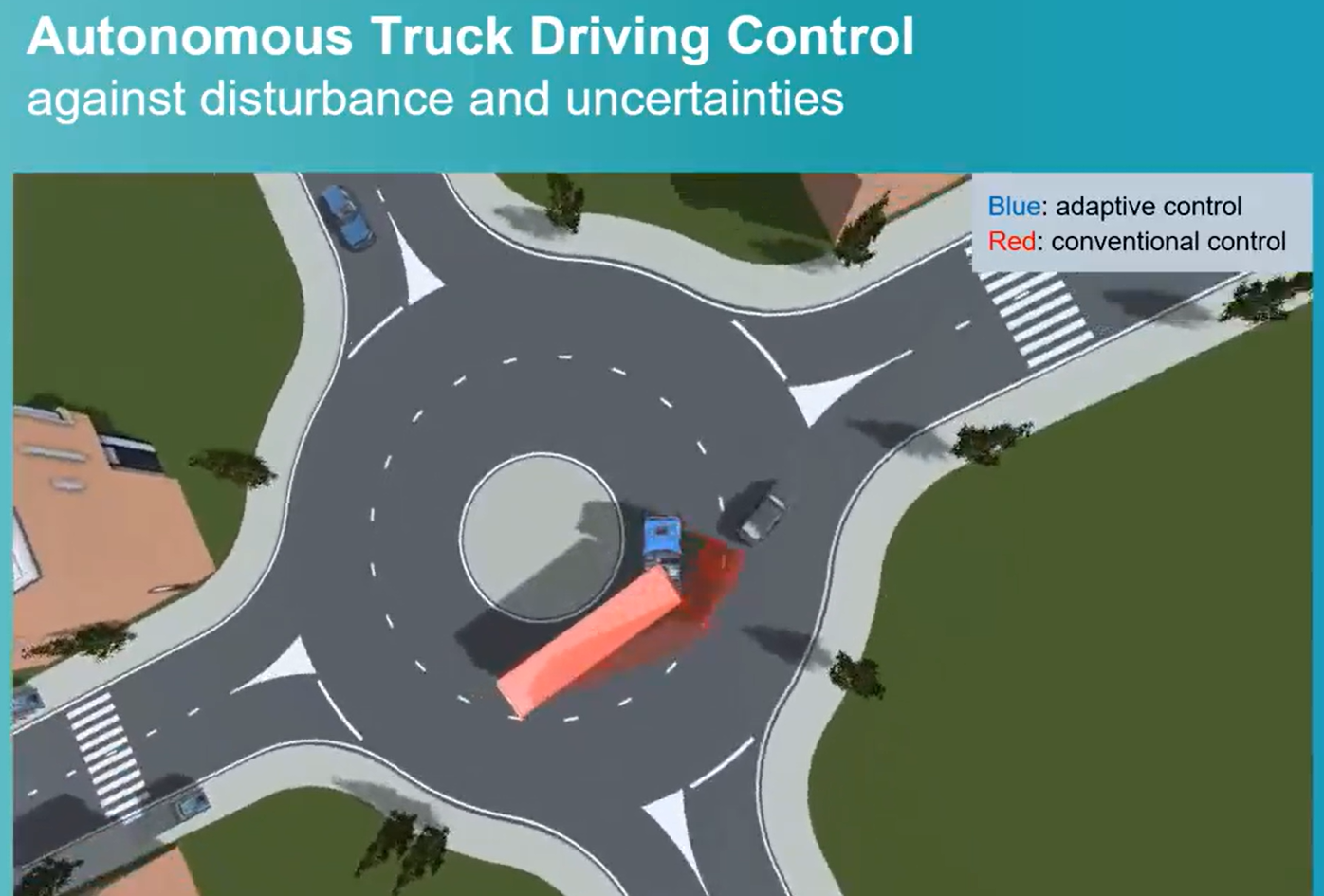
![[Paper] Real-time Safety-critical NMPC with Control Barrier Function (CBF)](/blog/2024/03/real-time-safety-critical-nmpc-cbf/cover.png)
4-5 years ago we developed an intuition to deal with this challenge, learning from control barrier function (CBF) from legged robotics community.
The goal of this project is to enhance safety and comfort in autonomous driving. Altogether we are developing and advancing different ADAS technologies, i.e. data collection, processing, scenario extraction-generation, algorithms (AI, control), XiL testing (X = model, hardware, human), and validation using several autonomous vehicle platforms.
![[Demo] ADAS Comfort](/blog/2023/08/demo-adas-comfort/cover.png)
SADAS performance is often evaluated based on safety, and from the outsider's perspective, i.e. check if there is a collision. What is not commonly known is that perceived safety and comfort are similarly important in ADAS development. See below a short interesting demo from insider or passenger's view on lane change maneuvers. "
![[Paper] MPC-based Imitation Learning for Human-like Autonomous Driving](/blog/2022/11/mpc-based-imitation-learning-human-like-autonomous-driving/cover.jpg)
This paper draft is a nice piece of writing with quite some works, discussions, demonstrations, and evaluations on different learning methods.

An interesting interview on the topic of ADAS comfort, made by Siemens Simcenter Engineering with our ADAS research engineer, Flavia.

We show a demo comparison for an autonomous lane change scenario, where the same vehicle control system was applied to two vehicle dynamics models
![[Paper] IEEE IV 2021, IEEE ITSC 2021, JSAE 2021](/blog/2021/07/paper-2021-iv-itsc-jsae/cover.png)
In the last few months, we have made some more progress to tackle some autonomous driving challenges in industry.

The key is to optimize control actions over a prediction horizon, which is often short due to computation.
People actually wants more from autonomous car, be cautious but also aggressive when necessary, be able and flexible moving along the tradeoff curves until physical limitation.
![[Demo] Designing ADAS algorithms to Enhance Safety and Comfort](/blog/2021/01/designing-adas-algorithms-enhance-safety-comfort/cover.png)
Next challenge is having an efficient framework from simulation to physical testing to validate your designs. This demo shows an example of our team works on MPC control development.
![[Demo] Vehicle Dynamics is Essential in Driving Performance.](/blog/2020/10/vehicle-dynamics-is-essential/cover.png)
Vehicle dynamics is essential for autonomous driving, in both safety and comfort performance. We show how to build a high fidelity vehicle model via simulation and proving ground testing, then exploit it for a safety-critical autonomous double lane change optimal control (MPC) development. This is a great video, with interesting (autonomous) driving scenes. Hope you will enjoy!
![[Papers] IEEE CDC 2019, IEEE CCTA2020, IEEE ACC 2020, IFAC World Congress 2020](/blog/2020/05/ieee-ifac-control-papers/cover.jpg)
With the CCTA accepted paper, we are happy to be involved and show our innovative solutions in the recent four largest events of IFAC and IEEE Control System Society.