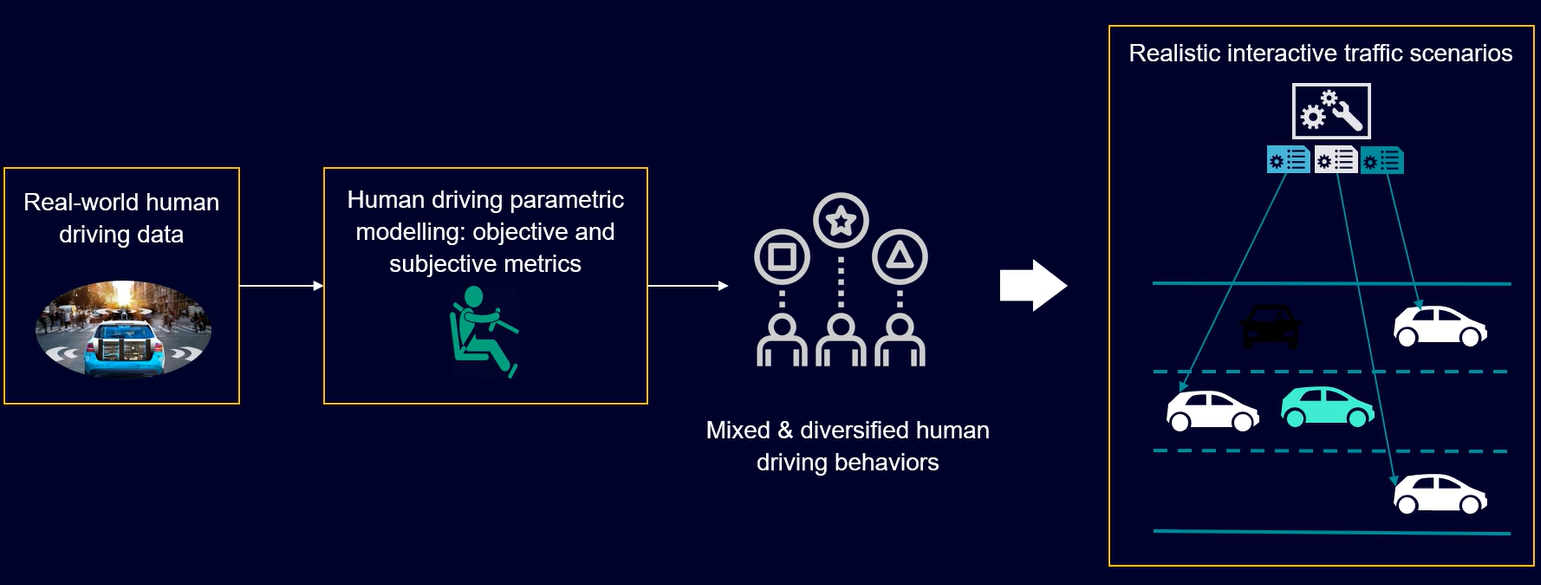
Our ADAS team in Siemens Digital Industries Software has been working on realistic multi-agent interactive traffic model. The parameters can be tuned to generate diversified realistic driving behaviour and styles. In addition, to improve imitation learning being more robust and adaptable, we develop a pipeline to automatically optimize the multi-agent traffic model for stress testing, then augment these data to enhance model training regarding to safety and comfort metrics.
If you are interested, please see the video for main ideas, and the paper for details: https://lnkd.in/e2S_f4ze (with Yurui Du, Flavia Sofia Acerbo, Jens Kober).