Imitation Learning
![[Paper] Is this the real driver, or is it just a robot?](/blog/2026/05/is-this-the-real-driver-or-just-a-robot/cover.jpg)
A study of human-like autonomous driving controllers in a driving simulator just got published in Transportation Research Part F: Traffic Psychology and Behavior. The article is written by Flavia Sofia Acerbo, the industrial PhD at Siemens and KU Leuven

In recent months, I’ve had the great honor of serving on PhD Defense Juries of four PhDs:
![[Paper] IROS 2024](/blog/2024/10/iros-2024/cover.jpg)
![[Papers] Human-centric AI in IEEE IROS and InCabin conferences](/blog/2024/10/human-centric-ai-iros-incabin-2024/cover.jpg)
A great pleasure to have our two research engineers going to present the company Siemens Digital Industries Software R&D activities on human-centric AI in IEEE IROS and InCabin conferences this month.

Pleasure to have Siemens and our activities on autonomous driving being shown in the L4DC conference
![[Paper] Data-driven Control for Human Driving Preferences](/blog/2024/04/data-driven-control-human-driving-preferences/cover.png)
Getting more insights of human driving preferences (i.e. when and how to brake, steering at different traffic scenarios), perceived safety, different cultures and styles,... are essential to improve ADAS control development
![[Papers] IFAC World Congress 2023](/blog/2023/07/ifac-world-congress-2023/cover.png)
1. Reinforcement Learning from Simulation to Real World; 2. MPC-Based Imitation Learning for Human-Like Autonomous Driving; 3. Critical Driving Behaviours Using Driver's Risk Field
![[Papers] European Control Conference (ECC) 2023](/blog/2023/06/european-control-conference-ecc-2023/cover.png)
Data-driven control: advanced optimal control, imitation learning, driver behavior models, reinforcement learning
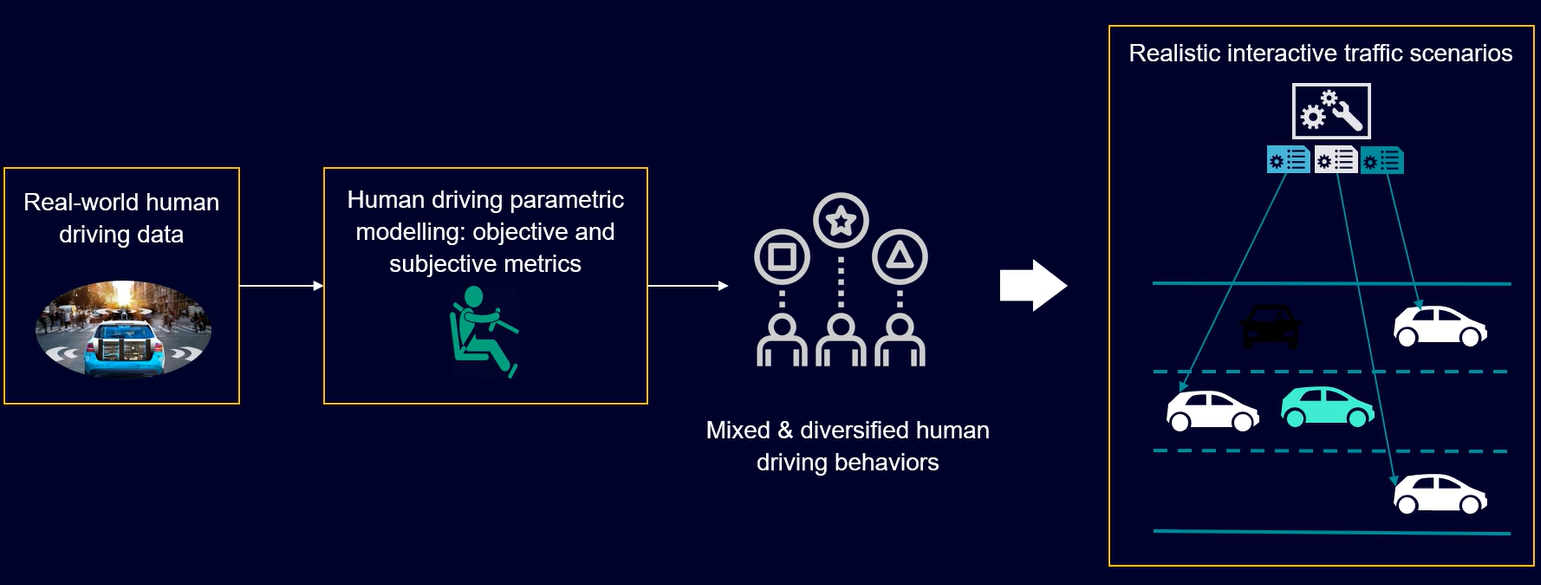
Learning from human driving demonstration is an interesting approach to improve autonomous driving policy. Still, it has some challenges: 1. majority logged data is from normal traffic situations, not sufficient critical and diverse scenarios data; and 2. during training and validation, the other traffic actors do not react to the ego's car policy, or no actual closed-loop response.
![[Paper] MPC-based Imitation Learning for Human-like Autonomous Driving](/blog/2022/11/mpc-based-imitation-learning-human-like-autonomous-driving/cover.jpg)
This paper draft is a nice piece of writing with quite some works, discussions, demonstrations, and evaluations on different learning methods.

The industrial PhD of Flavia is tackling some very interesting research, and this nice Award apparently shows a concrete progress. The work will also be presented at ICML (International Conference on Machine Learning) next week in Baltimore.

An interesting interview on the topic of ADAS comfort, made by Siemens Simcenter Engineering with our ADAS research engineer, Flavia.
![[Paper] Real-time Nonlinear MPC Strategy with Full Vehicle Validation for Autonomous Driving](/blog/2021/10/nmpc-paper/cover.png)
We present the development and deployment of an embedded optimal control strategy for autonomous driving applications on a Ford Focus road vehicle.Non-linear model predictive control (NMPC) is designed and deployed on a system with hard real-time constraints. We show the properties of sequential quadratic programming (SQP) optimization solvers that are suitable for driving tasks
![[Paper] IEEE IV 2021, IEEE ITSC 2021, JSAE 2021](/blog/2021/07/paper-2021-iv-itsc-jsae/cover.png)
In the last few months, we have made some more progress to tackle some autonomous driving challenges in industry.
Several interesting advanced control technologies will be discussed there: MPC, combined model-based and AI or data learning from both human data or model learning, reinforcement learning, drift parking control, truck crossing roundabout with a failed steering, handling in snowy weather, virtual sensing, verification of NN, and also XiL testing
![[Papers] IEEE CDC 2019, IEEE CCTA2020, IEEE ACC 2020, IFAC World Congress 2020](/blog/2020/05/ieee-ifac-control-papers/cover.jpg)
With the CCTA accepted paper, we are happy to be involved and show our innovative solutions in the recent four largest events of IFAC and IEEE Control System Society.