Reinforcement Learning

Pleasure to have Siemens and our activities on autonomous driving being shown in the L4DC conference
Data-driven control has become more popular recently, where measurement data is exploited to design higher performance controller, robust to uncertainties and change of environment.
![[Papers] IFAC World Congress 2023](/blog/2023/07/ifac-world-congress-2023/cover.png)
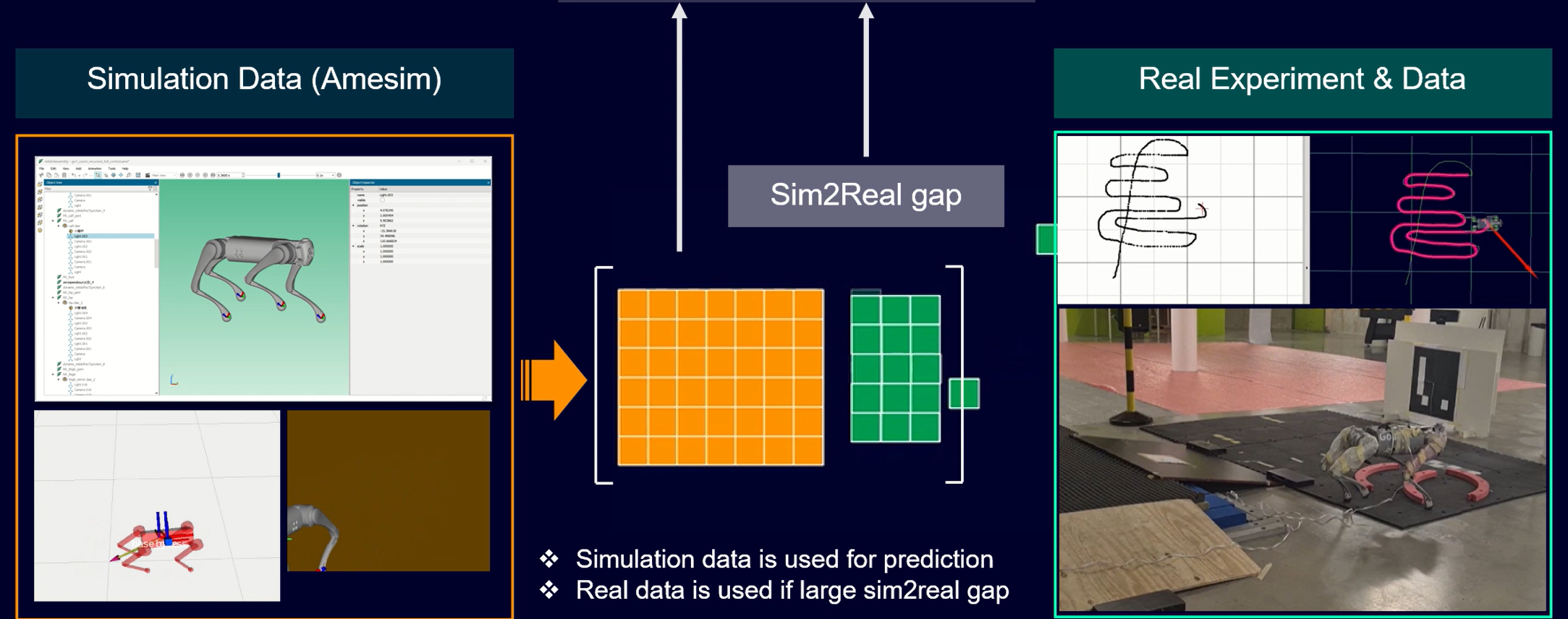
1. Reinforcement Learning from Simulation to Real World; 2. MPC-Based Imitation Learning for Human-Like Autonomous Driving; 3. Critical Driving Behaviours Using Driver's Risk Field
![[Papers] European Control Conference (ECC) 2023](/blog/2023/06/european-control-conference-ecc-2023/cover.png)
Data-driven control: advanced optimal control, imitation learning, driver behavior models, reinforcement learning
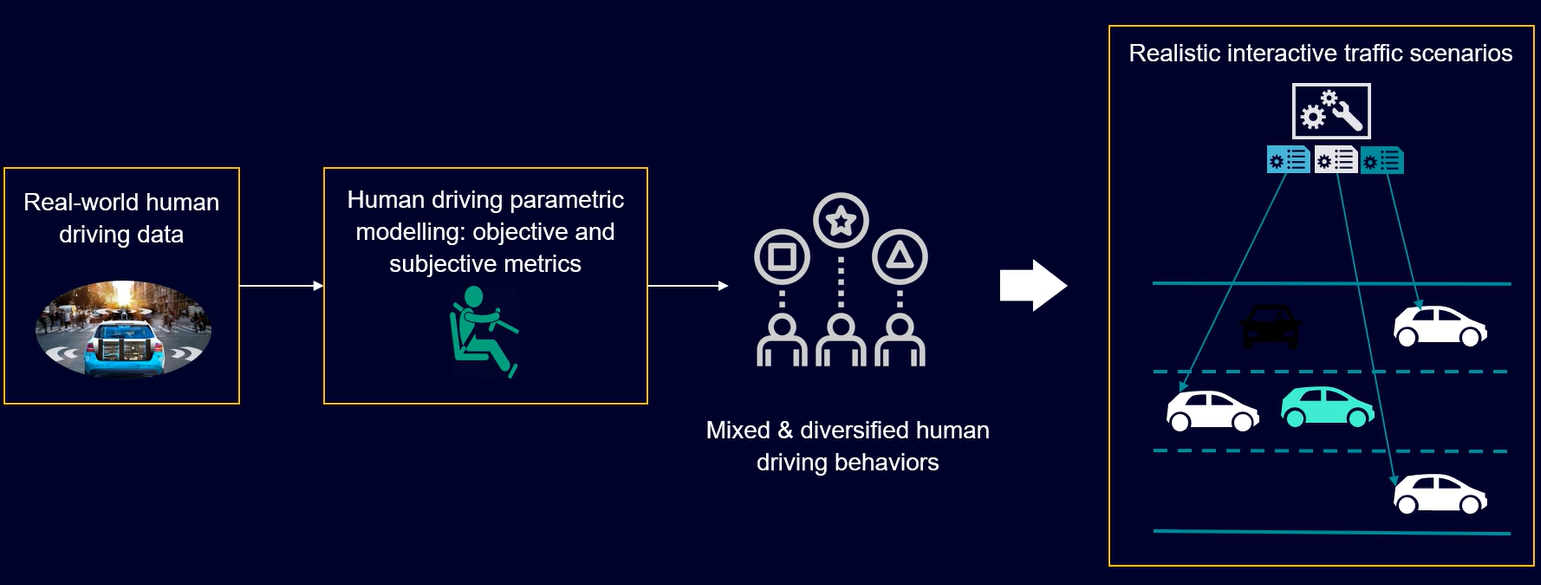
Learning from human driving demonstration is an interesting approach to improve autonomous driving policy. Still, it has some challenges: 1. majority logged data is from normal traffic situations, not sufficient critical and diverse scenarios data; and 2. during training and validation, the other traffic actors do not react to the ego's car policy, or no actual closed-loop response.

Reinforcement learning (RL) has shown capabilities to deal with complex systems, including autonomous driving. However, most results are only in simulation or game environments as training/testing in real life is unsafe and expensive.

The industrial PhD of Flavia is tackling some very interesting research, and this nice Award apparently shows a concrete progress. The work will also be presented at ICML (International Conference on Machine Learning) next week in Baltimore.
Covid time and new rules make it harder for both companies and universities. Still, this semester our R&D team at Siemens Digital Industries Software just welcomed three Master thesis/intern students coming from TU Delft Master of Robotics: Kevin Voogd, Jianfeng Cui, and Yurui Du.
![[Paper] IEEE IV 2021, IEEE ITSC 2021, JSAE 2021](/blog/2021/07/paper-2021-iv-itsc-jsae/cover.png)
In the last few months, we have made some more progress to tackle some autonomous driving challenges in industry.
Several interesting advanced control technologies will be discussed there: MPC, combined model-based and AI or data learning from both human data or model learning, reinforcement learning, drift parking control, truck crossing roundabout with a failed steering, handling in snowy weather, virtual sensing, verification of NN, and also XiL testing