Data-driven control has become more popular recently, where measurement data is exploited to design higher performance controller, robust to uncertainties and change of environment. In practice, the common idea is to learn a complementary model from data, i.e. neural network, Gaussian, kernel… Sometimes it is also possible to design controller directly from measured signals without specified parametric model - if the data is representative enough (persistent excitation, i.e. similar to multisine, step responses).
The practical challenges of data-driven control are: 1. hard to have such sufficient representative data, and 2. processing data and learn for real-time optimal control computation.
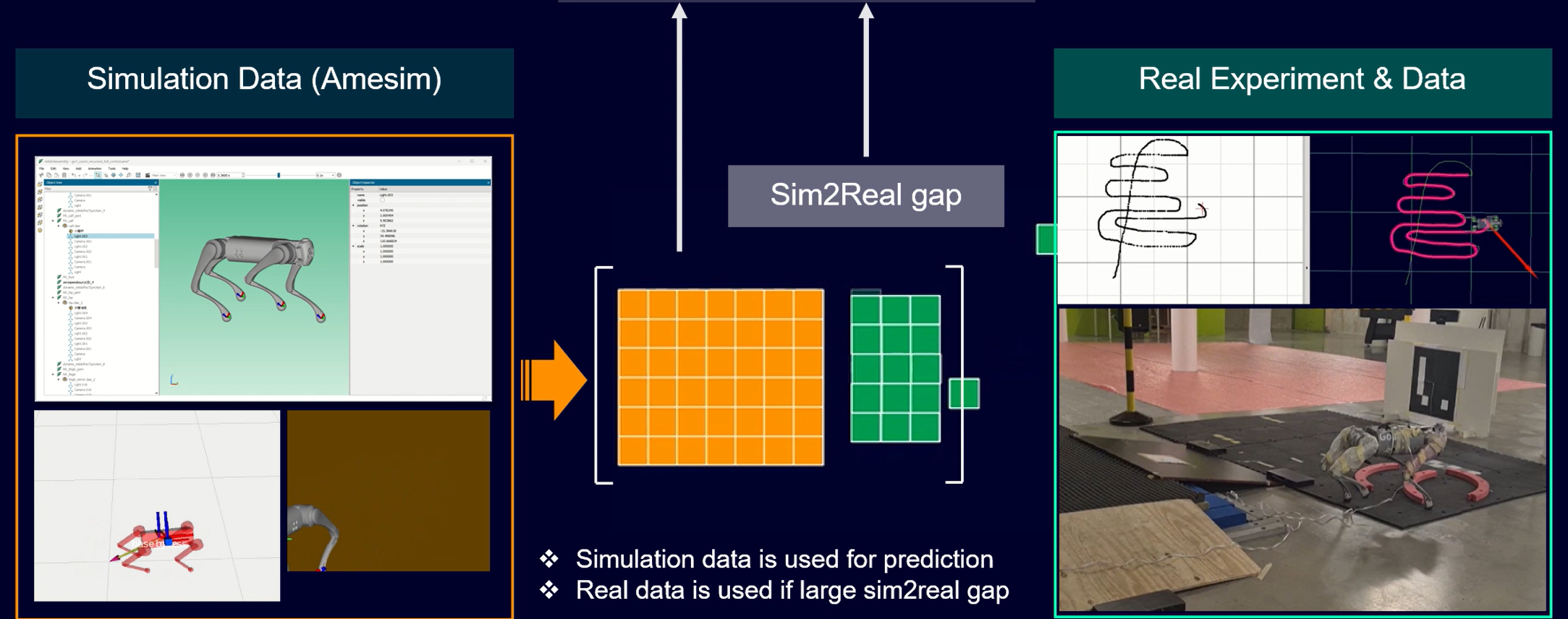
At Siemens Digital Industries Software, we believe Digital Twin can play a significant role here. A quality and high fidelity simulation model could complement the real data regarding to quality, representation, and frontload data learning/computation to offline.
The video below shows a nice work we done recently on legged robot platform, by Sven Becker, a smart thesis student from EPFL, Switzerland, together with Jean Pierre Allamaa from our Siemens engineering team and Prof. Colin Jones (EPFL). We use Simcenter Amesim to model and generate data, then use for (and accelerate) data-driven optimal control design in real robot. Developing from ground up with a new robot, leveraging Simcenter engineering tools, Sven has obtained many great results in just a few months (and hence his thesis outcome :) .
Hope you like the small demo.
Siemens Industry