Sim2Real
![[Blog] Siemens blog and video on robotics](/blog/2026/04/siemens-blog-video-on-robotics/cover.png)
As the robotics revolution accelerates, one of our key visions is to combine simulation with real world testing across all: from control systems to AI model development, to verification and validation (V&V)
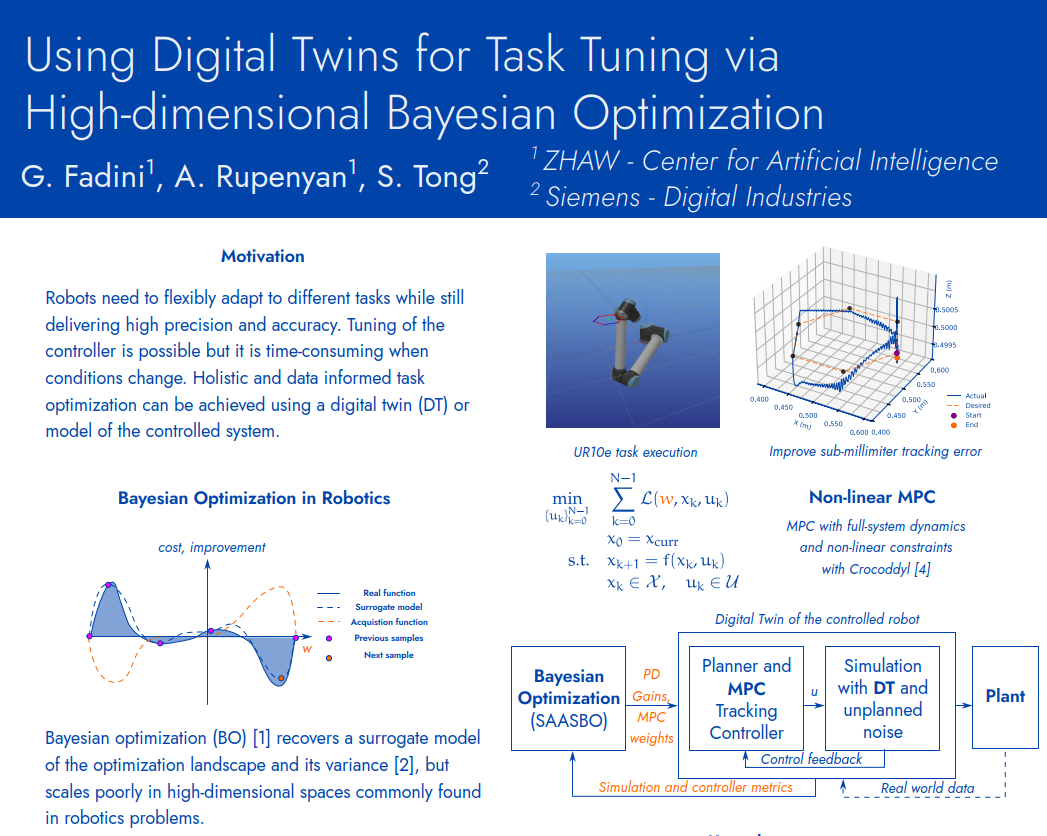
It is a pleasure working with Prof. Alisa Rupenyan-Vasileva and the Postdoc Gabriele Fadini (ZHAW Zurich University of Applied Sciences), who are actively investigating state of the art autocalibration of high-dimensional control parameters using a combination of Digital Twin technology and AI methods.
![[Demo] Real2Sim - Sim2Real](/blog/2025/05/demo-real2sim-sim2real/cover.png)
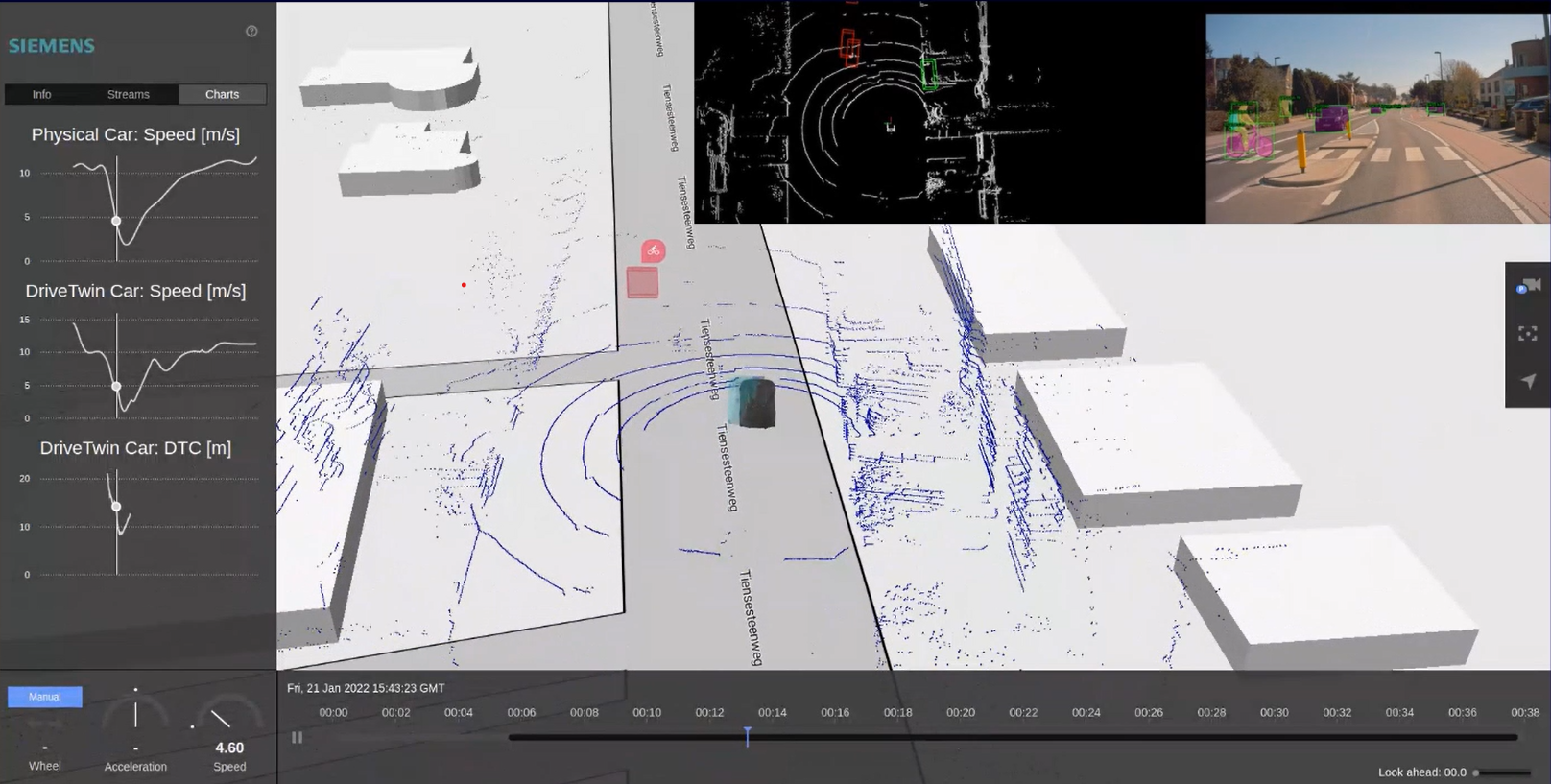
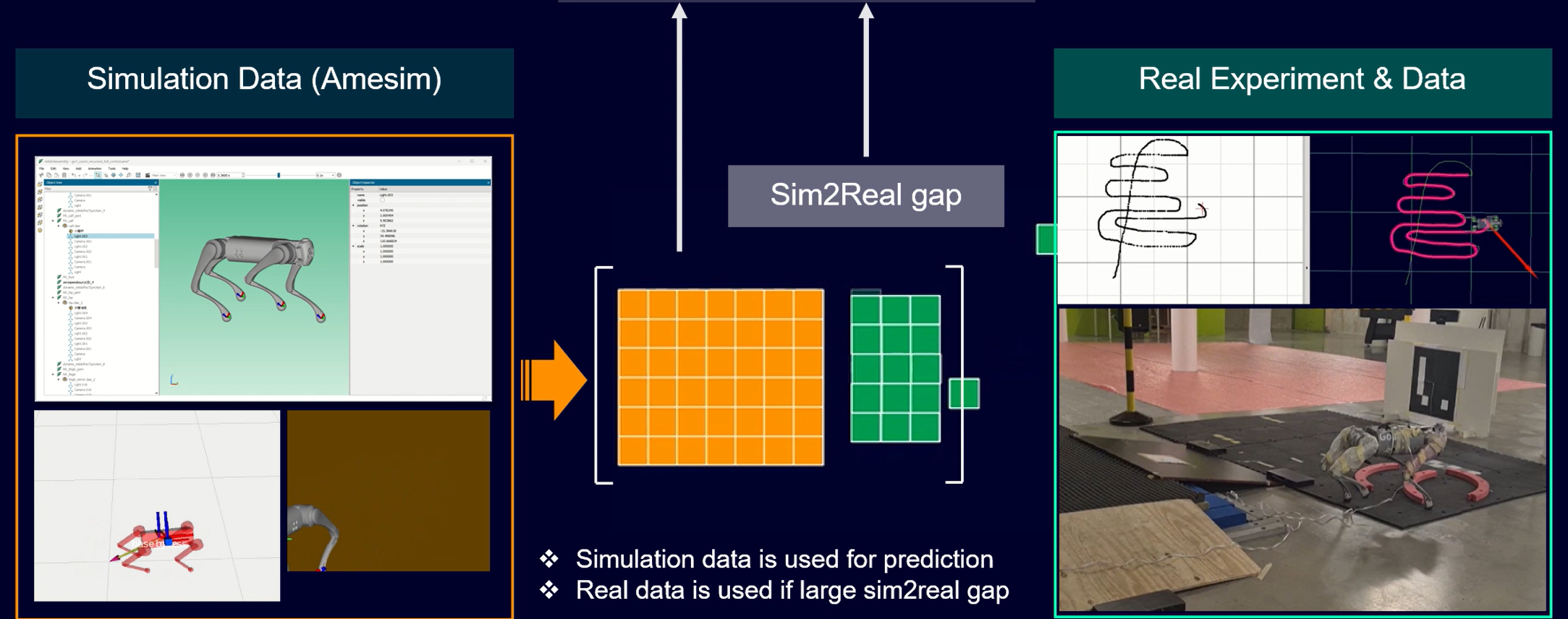
Bridging the gap of Real and Simulation (Real2Sim - Sim2Real) toward engineering values is interesting and motivating to see how far we could push the boundary. Take a look at our 3D scene reconstruction demo in a parking scene, compare virtual and real side by side.
![[Postdoc Position] Digital Twin for Robotics](/blog/2024/11/postdoc-position/cover.jpg)
Nice joint research project that combines academic and industrial environments. You will work on state of art control technologies and some cool applications :).
Autocalibration control technologies can drastically reduce time and cost for engineers when moving from simulation to real-world testing. The method is for wide range of applications, not only autonomous driving.
Data is very valuable for autonomous driving/ADAS engineers, i.e. training & validation of ADAS functions such as perception, planning, control.
Data-driven control has become more popular recently, where measurement data is exploited to design higher performance controller, robust to uncertainties and change of environment.
![[Papers] IFAC World Congress 2023](/blog/2023/07/ifac-world-congress-2023/cover.png)
1. Reinforcement Learning from Simulation to Real World; 2. MPC-Based Imitation Learning for Human-Like Autonomous Driving; 3. Critical Driving Behaviours Using Driver's Risk Field

Reinforcement learning (RL) has shown capabilities to deal with complex systems, including autonomous driving. However, most results are only in simulation or game environments as training/testing in real life is unsafe and expensive.