All Posts
Page 2
![[Demo] Industrial AI: CFD PhysicsAI](/blog/2026/02/industrial-ai-cfd-physicsai/cover.png)
The next wave of Industrial AI is accelerating, with physics-aware, trustworthy, and integration into engineering workflow.

The nice image comes straight from the actual research & development results. From right to left, you can see the Gaussian Splatting training process progressively improve the 3D reconstruction.
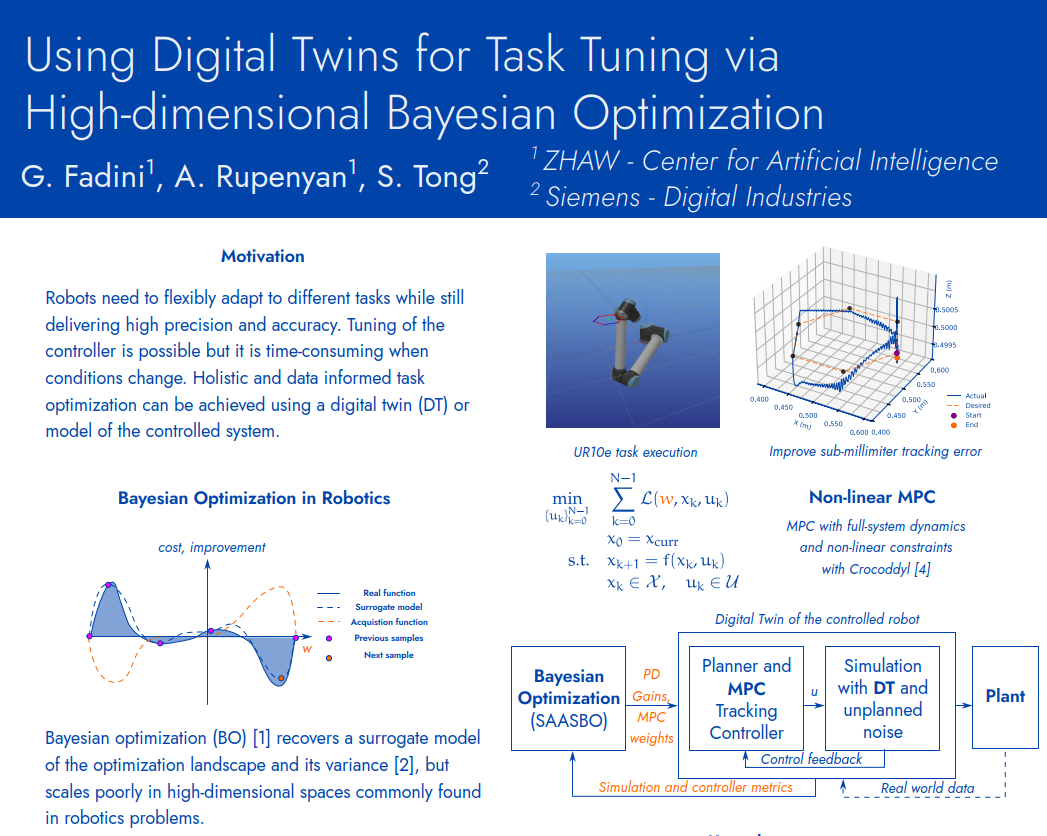
It is a pleasure working with Prof. Alisa Rupenyan-Vasileva and the Postdoc Gabriele Fadini (ZHAW Zurich University of Applied Sciences), who are actively investigating state of the art autocalibration of high-dimensional control parameters using a combination of Digital Twin technology and AI methods.
![[Demo] From Crash Data to Simulation Model](/blog/2025/09/from-crash-data-to-simulation/cover.png)
Connecting real crash data with standards (Euro NCAP, UNECE, ISO…) and ASAM OpenSCENARIO model

I’m grateful to have participated Formula Student event this year again as a Judge for the driverless racing category, and delivered a lecture on recent Digital Twin and Generative AI technologies in the industry. Above all, it’s always a pleasure to see Siemens well presented in the event and on many of those cars :).
![[Industrial PhD Position] Co-supervise with Univ. of Oxford](/blog/2025/08/phd-position-oxford/cover.png)
FYI, interesting PhD position on data-driven optimal control for Air Mobility and Battery Management in Oxford Control Group.
Nice pieces on suspension design, from 1D target cascading to 3D design requirements.
Launched in June 2025 with a total budget of 9.3M€. The project aims to develop a rigorous design and deployment methodology tailored for reliable, robust and trustworthy Generative AI.
![[Demo] Real2Sim and to ... Movies](/blog/2025/06/real2sim-to-movies/cover.png)
Bring Real data into Simulation (Real2Sim) and to... Movies.
![[Demo] Real2Sim - Sim2Real](/blog/2025/05/demo-real2sim-sim2real/cover.png)
Bridging the gap of Real and Simulation (Real2Sim - Sim2Real) toward engineering values is interesting and motivating to see how far we could push the boundary. Take a look at our 3D scene reconstruction demo in a parking scene, compare virtual and real side by side.
![[Demo] Explainable MPC Control](/blog/2025/05/explainable-mpc-control/cover.png)
One often overlooked topic in control systems engineering is explainability. Control engineers are typically trained, through university or research, to design systems from the ground up, starting with physics-based modeling, model identification, stability analysis, control design, and then iterating with performance evaluation. This process provides engineers insight into the system, enabling intuitive for parameter calibration.
![[Demo] Real2Sim Gaussian Splatting with Materials & Textures](/blog/2025/04/real2sim-gaussian-splatting-materials-textures/cover.png)
When reconstructing 3D traffic model from real world data (Real2Sim), one of the challenges is incorporating physical properties such as materials and textures.