All Posts
Page 8
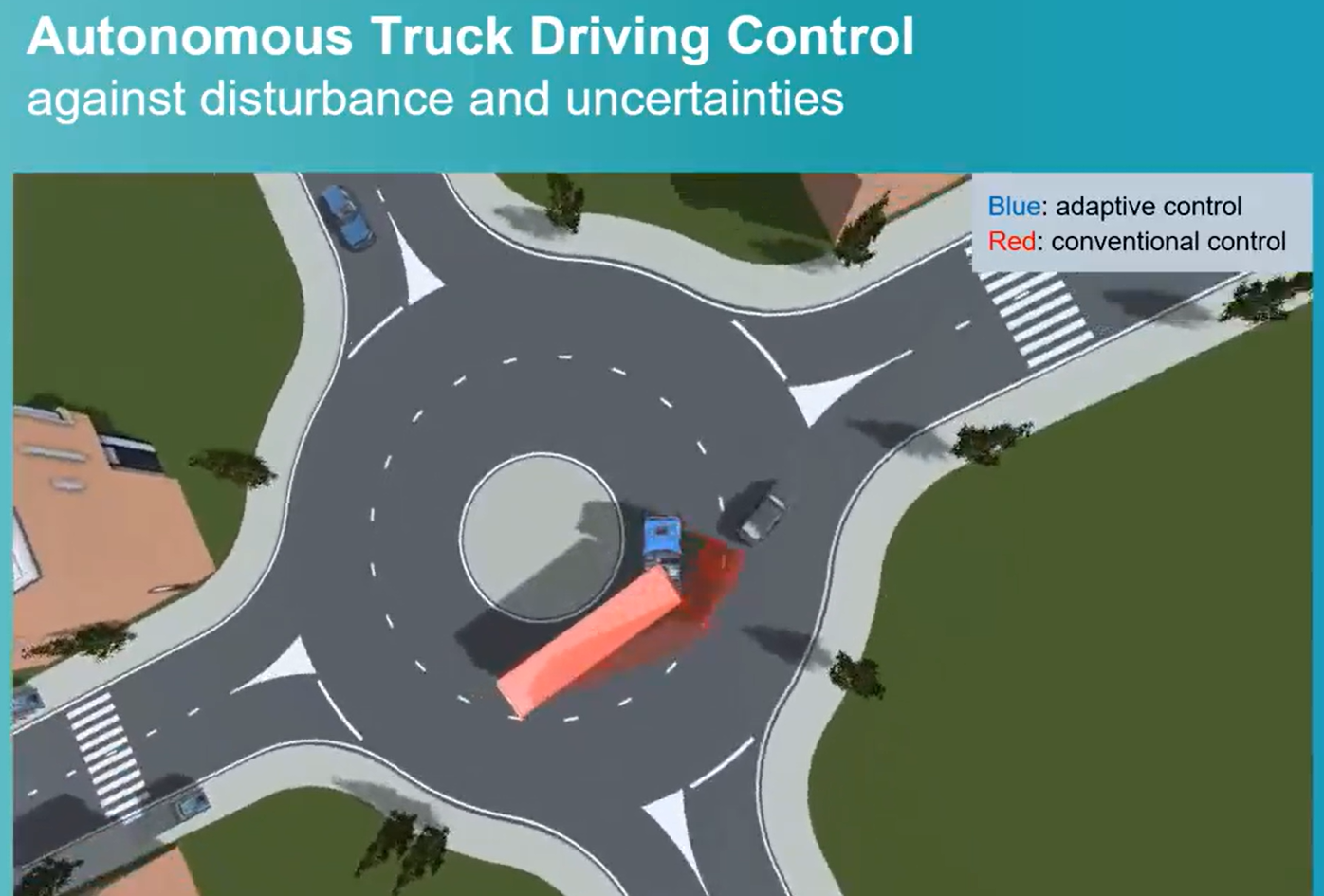
People actually wants more from autonomous car, be cautious but also aggressive when necessary, be able and flexible moving along the tradeoff curves until physical limitation.
![[Demo] From Development (Perception, Planning, Control) to Validation Framework](/blog/2021/01/from-development-to-validation-framework/cover.png)
Besides, a nice example of collaboration not only within the team engineers but also with Marketing dept., who captures well the main messages, on-site ADAS demos and put them in such illustrative video
![[Demo] Designing ADAS algorithms to Enhance Safety and Comfort](/blog/2021/01/designing-adas-algorithms-enhance-safety-comfort/cover.png)
Next challenge is having an efficient framework from simulation to physical testing to validate your designs. This demo shows an example of our team works on MPC control development.

If you are participating and interested in automotive & autonomous vehicle, please consider the automotive control session next Wednesday afternoon. I and Karl Berntorp will co-chair it, hopefully we would have some interesting discussions and chats there.
![[Demo] Vehicle Dynamics is Essential in Driving Performance.](/blog/2020/10/vehicle-dynamics-is-essential/cover.png)
Vehicle dynamics is essential for autonomous driving, in both safety and comfort performance. We show how to build a high fidelity vehicle model via simulation and proving ground testing, then exploit it for a safety-critical autonomous double lane change optimal control (MPC) development. This is a great video, with interesting (autonomous) driving scenes. Hope you will enjoy!
Several interesting advanced control technologies will be discussed there: MPC, combined model-based and AI or data learning from both human data or model learning, reinforcement learning, drift parking control, truck crossing roundabout with a failed steering, handling in snowy weather, virtual sensing, verification of NN, and also XiL testing
![[Papers] IEEE CDC 2019, IEEE CCTA2020, IEEE ACC 2020, IFAC World Congress 2020](/blog/2020/05/ieee-ifac-control-papers/cover.jpg)
With the CCTA accepted paper, we are happy to be involved and show our innovative solutions in the recent four largest events of IFAC and IEEE Control System Society.

A nice work and interesting whitepaper from Siemens DI colleagues on autonomous driving scenarios testing, verification and validation. These topics are critical for your autonomous vehicle development

It is my great pleasure to be in the finalist of AutoSens Award in the Most Influential Research Category for the our R&D works on autonomous vehicle control developments!

I'm proud to have received the 2018 Siemens DF PL Invention of the Year Award. The solution will be contributed to Siemens PLM Software autonomous vehicles sector business
A great pleasure to visit Automatic Control Laboratory (LA) and Prof. Colin Jones