All Posts
Page 4
Data is very valuable for autonomous driving/ADAS engineers, i.e. training & validation of ADAS functions such as perception, planning, control.
I believe not only me but many autonomous driving engineers/researchers once has a dream that one day the vehicle sensor can sense the environment like we human do.
![[Paper] JSAE2024 Congress](/blog/2024/05/jsae2024-congress/cover.png)
Together with Siemens colleagues in Japan, we are happy to jointly presenting our recent technologies on logged data and simulation exploitation for ADAS validation in JSAE2024 Congress (Japanese Society of Automotive Engineers), May 22-24 in Yokohama, Japan.
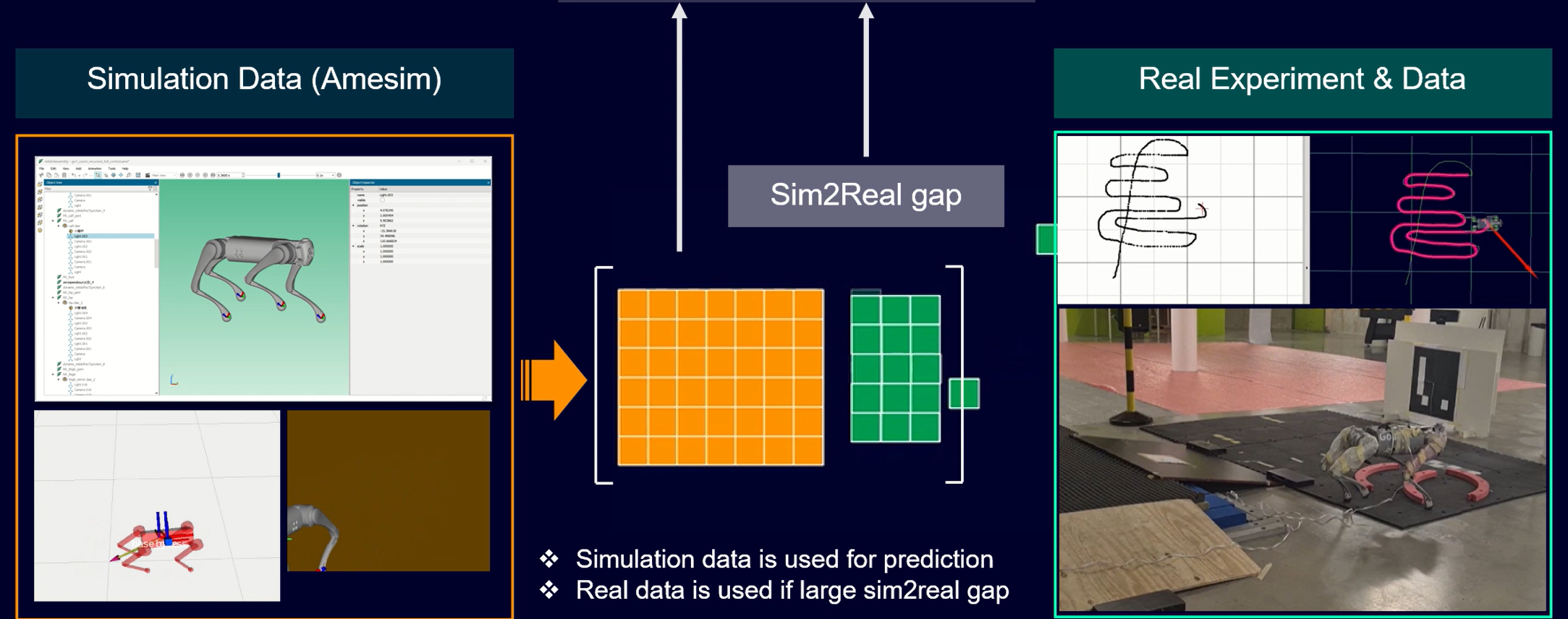
Data-driven control has become more popular recently, where measurement data is exploited to design higher performance controller, robust to uncertainties and change of environment.
![[Paper] Data-driven Control for Human Driving Preferences](/blog/2024/04/data-driven-control-human-driving-preferences/cover.png)
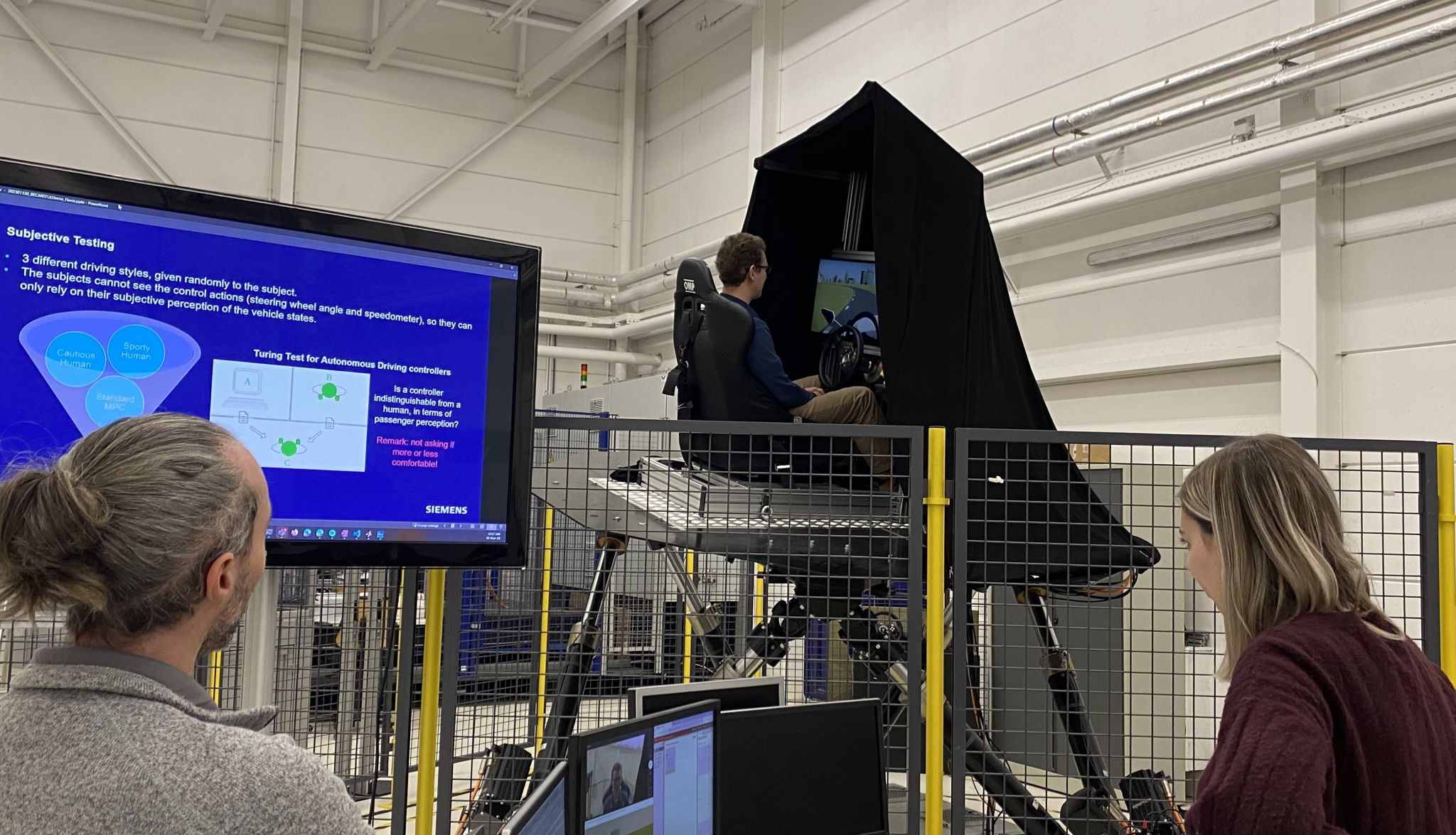
Getting more insights of human driving preferences (i.e. when and how to brake, steering at different traffic scenarios), perceived safety, different cultures and styles,... are essential to improve ADAS control development
Last week, I had the pleasure of visiting Oxford Control Group and deliver a seminar there. It was an excellent opportunity to meet and discuss with great researchers in control systems, data-driven, and safety-based optimization fields. I was also delighted to hear that our works have inspired some PhDs there on their research :) .
![[Paper] Real-time Safety-critical NMPC with Control Barrier Function (CBF)](/blog/2024/03/real-time-safety-critical-nmpc-cbf/cover.png)
4-5 years ago we developed an intuition to deal with this challenge, learning from control barrier function (CBF) from legged robotics community.
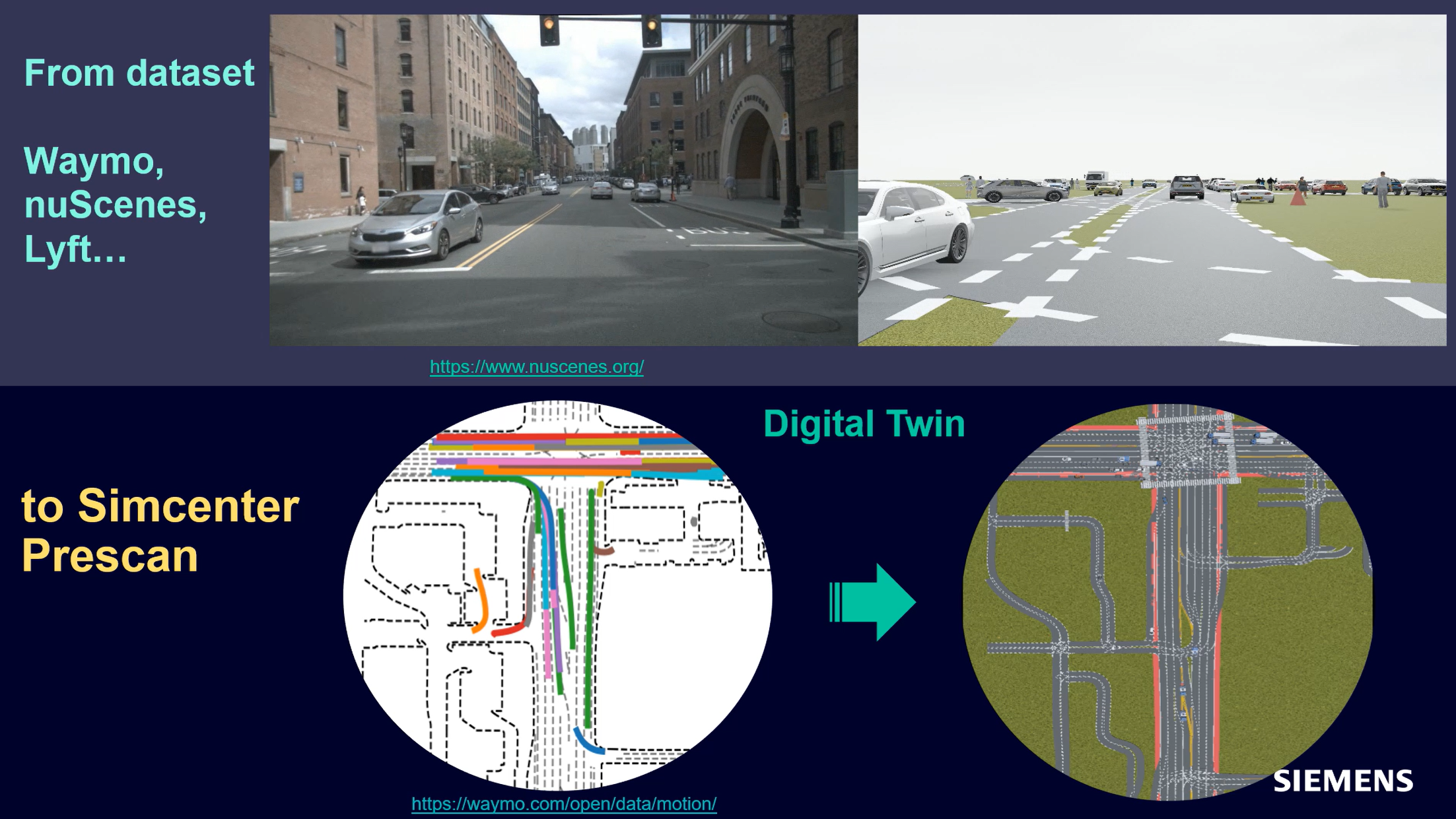
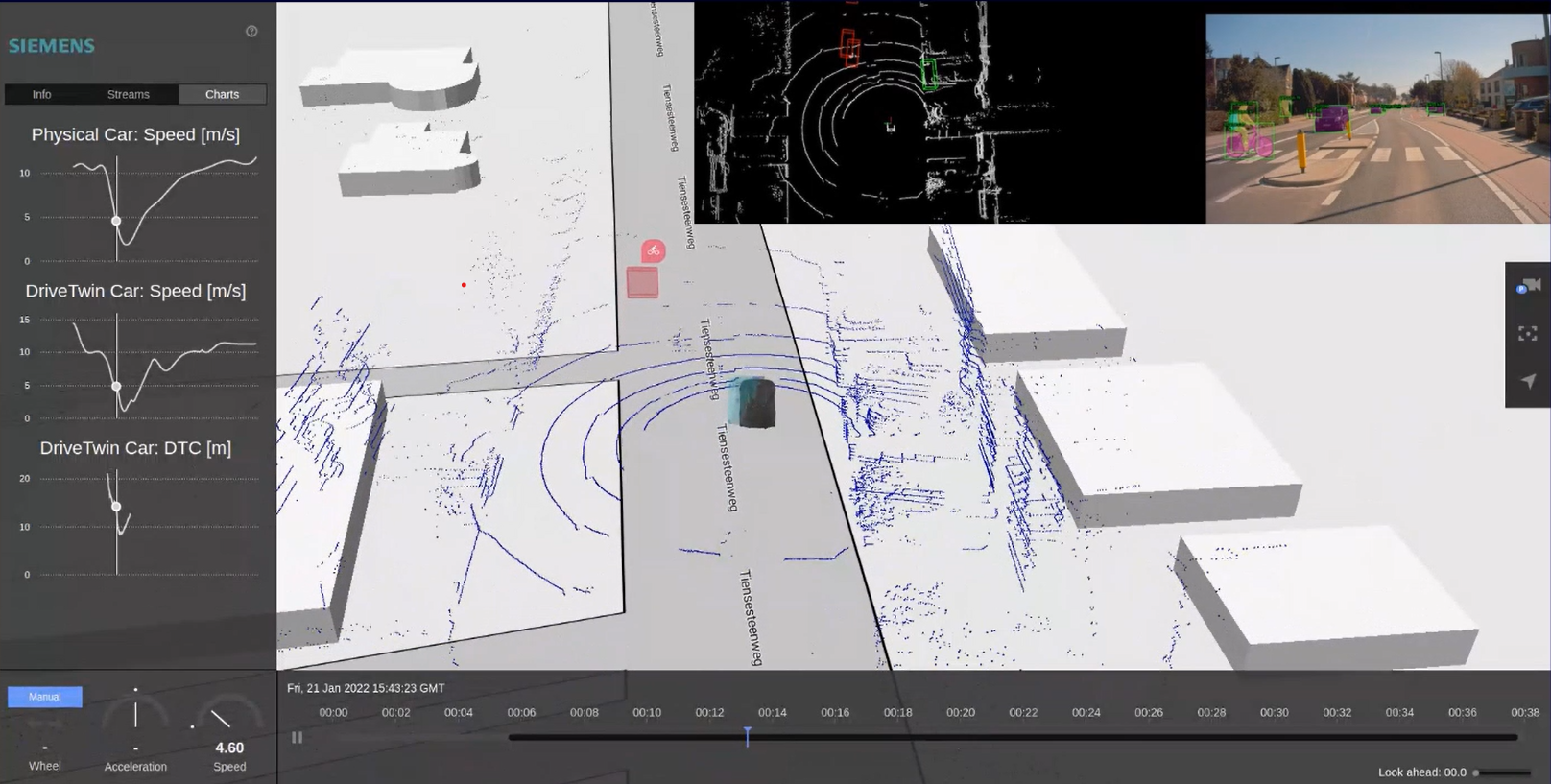
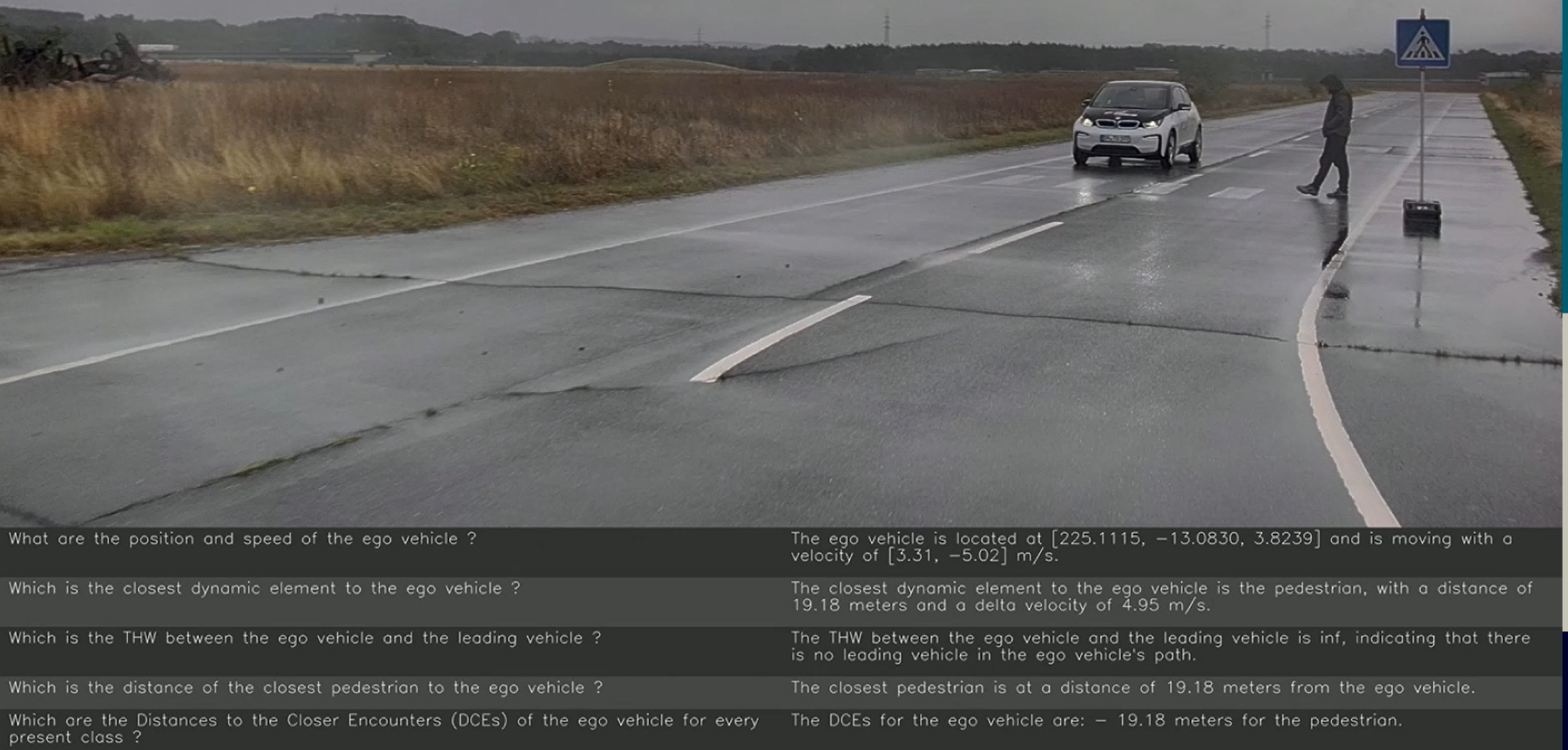
Autonomous vehicle dataset such as nuScenes, Waymo Motion, or your own collected one, is known valuable for algorithm development and testing. What's more?
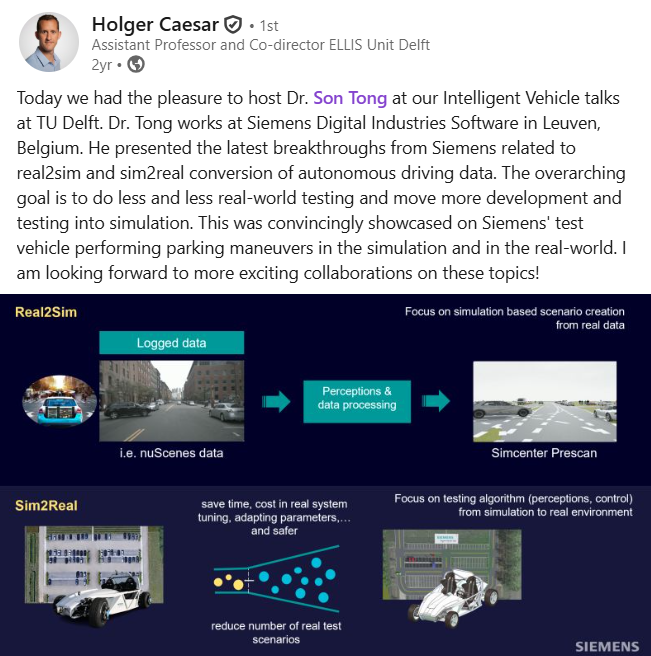
The goal of this project is to enhance safety and comfort in autonomous driving. Altogether we are developing and advancing different ADAS technologies, i.e. data collection, processing, scenario extraction-generation, algorithms (AI, control), XiL testing (X = model, hardware, human), and validation using several autonomous vehicle platforms.

While keep pushing the boundary of AI technologies in safety-critical applications like autonomous vehicles and medical applications, at Siemens we have been jointly develop with FOCETA partners technologies like requirements formulation, critical scenario generation, safety monitoring, explainable AI, adversarial examples....
![[Demo] Real2Sim Waymo Dataset](/blog/2023/11/real2sim-waymo-dataset/cover.png)
Bring real collected data into simulation (Real2Sim) is essential activity in ADAS testing, allow engineers to test different sensor, vehicle dynamics models, as well as various what-if traffic scenarios.